در دنیای امروز، سامانههای موقعیتیابی ماهوارهای (GNSS) به عنوان یکی از ابزارهای کلیدی در کاربردهای مختلف از قبیل مهندسی، حملونقل، کشاورزی و حتی کاربردهای نظامی شناخته میشوند. یکی از فناوریهای پیشرفته که دقت موقعیتیابی را به سطحی بالاتر ارتقا میدهد، فناوری “موقعیتیابی نقطهای دقیق” یا PPP (Precise Point Positioning) است.
فناوری PPP به عنوان یک رویکرد نوین در بهبود دقت موقعیتیابی در گیرندههای GNSS، با وجود چالشهایی همچون زمان همگرا شدن و نیاز به دادههای دقیق، امکانات بینظیری را در کاربردهای مختلف فراهم کرده است. با توجه به پیشرفتهای روزافزون در زمینه فناوریهای ماهوارهای و الگوریتمهای پردازشی، انتظار میرود که کاربردهای PPP در آینده گستردهتر شده و به یکی از ارکان اصلی سامانههای موقعیتیابی تبدیل شود.
این فناوری نه تنها توانسته است دقت موقعیتیابی را به سطحی بسیار بالا برساند، بلکه امکان استفاده در محیطهای دورافتاده و شرایط پیچیده جوی را نیز فراهم کرده است؛ امری که اهمیت ویژهای در توسعه فناوریهای نوین و سیستمهای هوشمند دارد.
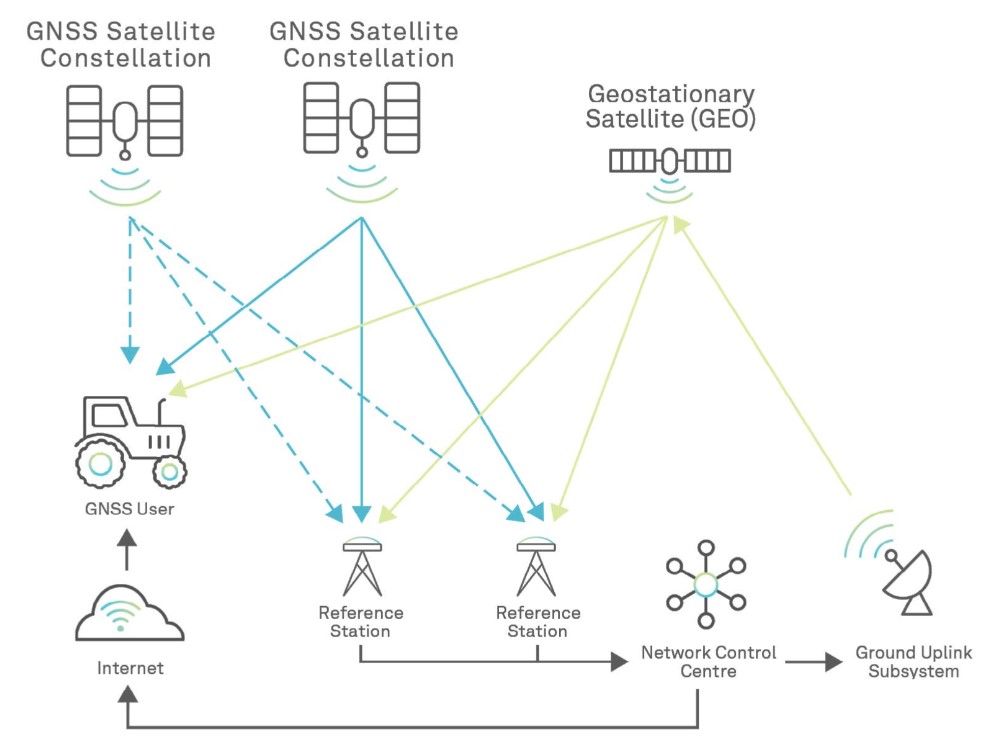
فناوری PPP با استفاده از دادههای اصلاح دقیق مدار و ساعت ماهوارهها، به یک گیرنده GNSS این امکان را میدهد تا موقعیت خود را با دقت بسیار بالا محاسبه کند. برخلاف روشهای دیفرانسیلی که نیاز به ایستگاه مرجع محلی دارند، PPP تنها به دادههای تصحیح ارائه شده از شبکههای جهانی مانند IGS متکی است.
اصلاح مدار و ساعت ماهواره
دریافت دادههای دقیق مربوط به مدار و ساعت ماهوارهها از ایستگاه ها
مدلسازی خطاهای انتقال
اعمال تصحیحات لازم برای خطاهای ناشی از اثرات جو (مانند تاخیر یونوسفریک و تأخیر تراکم) و اثرات چندمسیره
الگوریتمهای پیشرفته
استفاده از الگوریتمهای ریاضی و فیلترینگ (مانند فیلتر کالمن) برای کاهش خطاها و بهبود دقت برآورد موقعیت.
عملکرد فناوری PPP (موقعیتیابی نقطهای دقیق) به این صورت است که ابتدا؛ گیرنده GNSS اطلاعات خام مانند زمان دریافت، فاز سیگنال و دیگر پارامترهای مرتبط را ثبت میکند. سپس دادههای دقیق مدار و ساعت ماهوارهها از مراکز تخصصی نظیر IGS دریافت شده و به منظور تصحیح خطاهای سیستمی بکار گرفته میشوند. در ادامه، با استفاده از مدلهای ریاضی، اثرات جوی از جمله تاخیر یونوسفریک و تأخیر در یونوزفر مورد محاسبه و تصحیح قرار میگیرند. الگوریتمهای پیشرفته فیلترینگ، مانند فیلتر کالمن، دادههای تصحیحشده را پردازش کرده و خطاهای باقیمانده را کاهش میدهند. در نهایت، با ترکیب تمامی این مراحل، موقعیت دقیق گیرنده با دقت چند سانتیمتری محاسبه میشود.